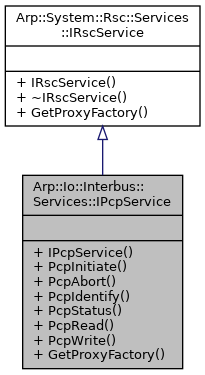
Service to communicate to PCP devices
More...
#include <IPcpService.hpp>
|
| | IPcpService (void)=default |
| | Constructs an IPcpService instance. More...
|
| |
| virtual InitiateResult | PcpInitiate (uint8 communicationReference)=0 |
| | Establish connection to a PCP device More...
|
| |
| virtual void | PcpAbort (uint8 communicationReference, uint8 reasonCode, const std::vector< uint8 > &abortDetail)=0 |
| | Abort connection to a PCP device More...
|
| |
| virtual IdentifyResult | PcpIdentify (uint8 communicationReference, uint8 invokeId)=0 |
| | Get device information of PCP device. More...
|
| |
| virtual StatusResult | PcpStatus (uint8 communicationReference, uint8 invokeId)=0 |
| | Get current status of PCP device More...
|
| |
| virtual InterbusResult | PcpRead (uint8 communicationReference, uint8 invokeId, const ObjectAddress &pcpObject, std::vector< uint8 > &data)=0 |
| | Read data record from PCP device More...
|
| |
| virtual InterbusResult | PcpWrite (uint8 communicationReference, uint8 invokeId, const ObjectAddress &pcpObject, const std::vector< uint8 > &data)=0 |
| | Write data record to a PCP device More...
|
| |
| | IRscService (void)=default |
| | Constructs an IRscService instance. More...
|
| |
| virtual | ~IRscService (void)=default |
| | Destructs this instance and frees all resouces. More...
|
| |
|
|
static IRscServiceProxyFactory & | GetProxyFactory (void) |
| |
| static IRscServiceProxyFactory & | GetProxyFactory (void) |
| | Returns a reference to service proxy factory to create a proxy instance of the service More...
|
| |
Service to communicate to PCP devices
This service is defined in library Arp.Io.Interbus.
◆ IPcpService()
| Arp::Io::Interbus::Services::IPcpService::IPcpService |
( |
void |
| ) |
|
|
default |
◆ PcpAbort()
| virtual void Arp::Io::Interbus::Services::IPcpService::PcpAbort |
( |
uint8 |
communicationReference, |
|
|
uint8 |
reasonCode, |
|
|
const std::vector< uint8 > & |
abortDetail |
|
) |
| |
|
pure virtual |
Abort connection to a PCP device
- Parameters
-
| communicationReference | Communication reference |
| reasonCode | Reason for connection abort |
| abortDetail | Abort details |
◆ PcpIdentify()
| virtual IdentifyResult Arp::Io::Interbus::Services::IPcpService::PcpIdentify |
( |
uint8 |
communicationReference, |
|
|
uint8 |
invokeId |
|
) |
| |
|
pure virtual |
Get device information of PCP device.
- Parameters
-
| communicationReference | Communication reference |
| invokeId | Invode ID (Default value = 0) |
- Returns
- Structure with result Arp.Io.Interbus.Services.IdentifyResult
◆ PcpInitiate()
| virtual InitiateResult Arp::Io::Interbus::Services::IPcpService::PcpInitiate |
( |
uint8 |
communicationReference | ) |
|
|
pure virtual |
◆ PcpRead()
Read data record from PCP device
- Parameters
-
| communicationReference | Communication reference |
| invokeId | Invoke ID (Default value = 0) |
| pcpObject | PCP object |
| data | Data that are read from the object |
- Returns
- Structure with error information Arp.Io.Interbus.Services.InterbusResult
◆ PcpStatus()
| virtual StatusResult Arp::Io::Interbus::Services::IPcpService::PcpStatus |
( |
uint8 |
communicationReference, |
|
|
uint8 |
invokeId |
|
) |
| |
|
pure virtual |
Get current status of PCP device
- Parameters
-
| communicationReference | Communication reference |
| invokeId | Invoke ID (Default value = 0) |
- Returns
- Structure with result Arp.Io.Interbus.Services.StatusResult
◆ PcpWrite()
Write data record to a PCP device
- Parameters
-
| communicationReference | Communication reference |
| invokeId | Invoke ID (Default value = 0) |
| pcpObject | PCP object |
| data | Data that shall be written in the object |
- Returns
- Structure with error information Arp.Io.Interbus.Services.InterbusResult
The documentation for this class was generated from the following file:
 Public Types inherited from Arp::System::Rsc::Services::IRscService
Public Types inherited from Arp::System::Rsc::Services::IRscService